Publications
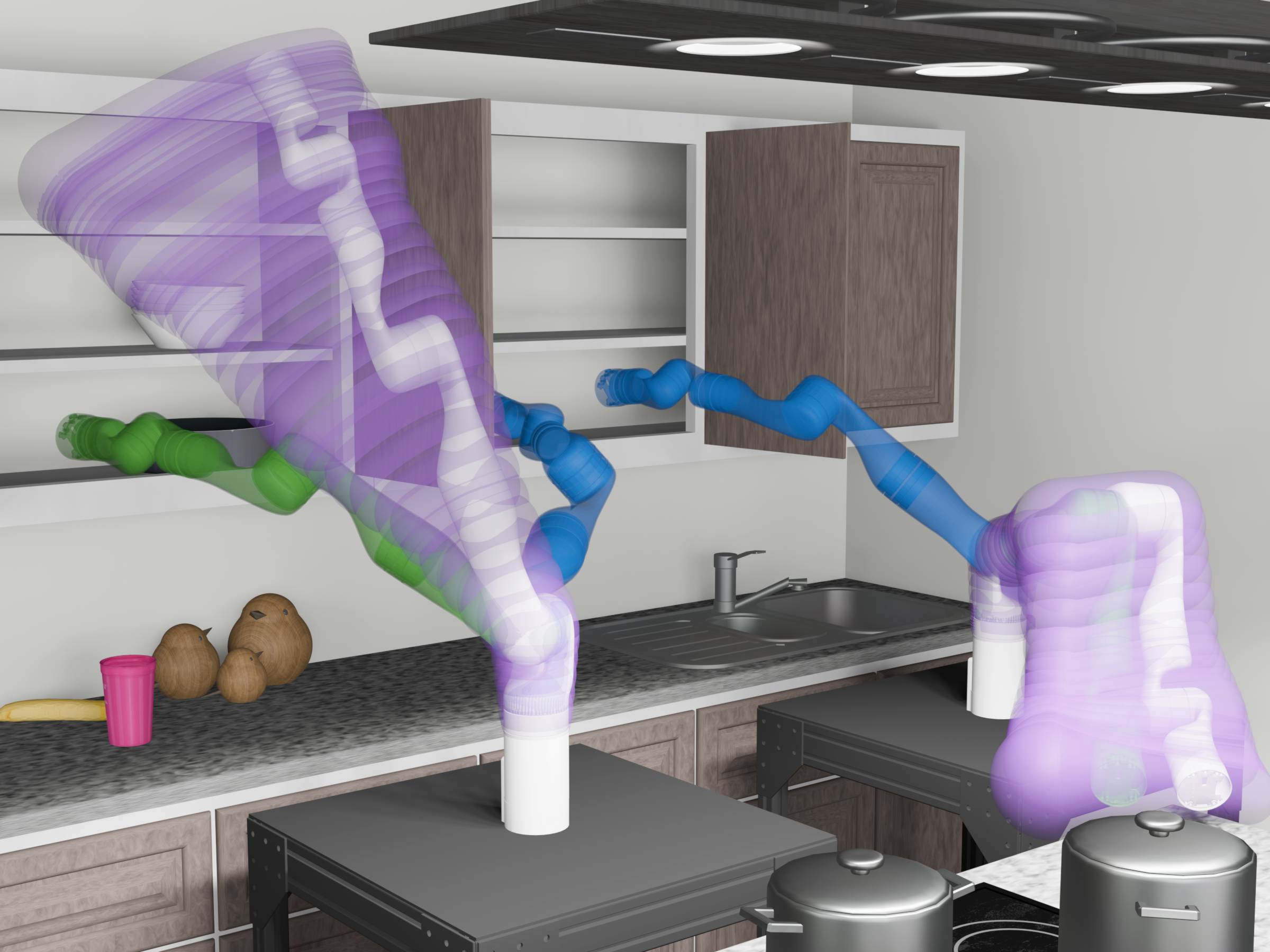
(SPARROWS) Safe Planning for Articulated Robots Using Reachability-based Obstacle Avoidance With Spheres
Jonathan Michaux, Adam Li, Qingyi Chen, Che Chen, Bohao Zhang, Ram Vasudevan
In Submission, 2024

(SEL Map) These Maps Are Made For Walking: Real-Time Terrain Property Estimation for Mobile Robots
Parker Ewen, Adam Li, Yuxin Chen, Steven Hong, Ram Vasudevan
IEEE Robotics and Automation Letters, 2022
Contributor
SEVA: Socio-Ecological Visual Analytics
Part of the frontend development team through RPI’s Center for Architecture Science and Ecology in 2018.